




prev
next
世代交替好的眼睛,讓您先贏在起跑點!
買深度攝影機找飆機器人就對了!
全系列商品皆附範例教學,讓您輕鬆上手!
點擊後進入各專區
特性分類
— 👆 一般|通用
— 👆 工業|車規
— 👆 入門|基礎
— 👆 AR/VR|人機互動
品牌分類
— 👆 intel Realsense
— 👆 酷博樂 Cupola
應用文章
深度攝影輕鬆上手套件及全景攝影機(適用Pi5、Jetson Orin、intel IPC)



全景相機 ( Cupola360 )|定位建圖巡檢





暢銷款式比較清單
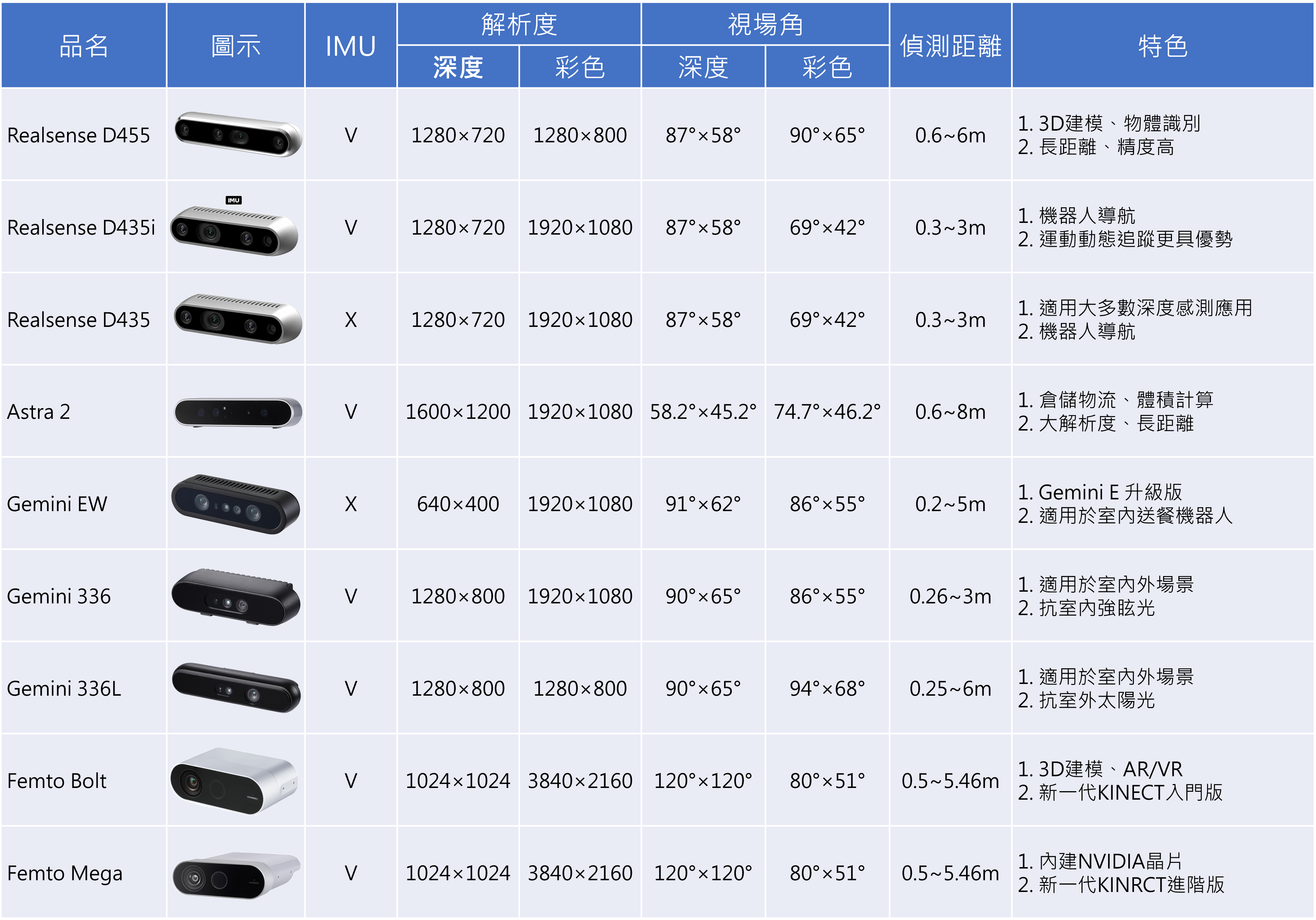
深度攝影機
































| D457 | D455 | D435 | D435i | D435f | D415 | D405 | |
|---|---|---|---|---|---|---|---|
| 影像感測器技術 |
全局快門 |
捲簾快門 (適用於靜態) |
全局快門 (適用於動態) |
||||
|
深度 FOV (H × V) |
87°×58° | 65°×40° | 84°×58° | ||||
| 深度分辨率 | 1280×720 | 1280x720 | 1280×800 | ||||
| 深度精度 | <2% | ||||||
| 深度幀率 | 90 fps | ||||||
| 深度過濾器 | All Pass | IR Pass | All Pass | IR Cut | |||
| RGB 技術 | 全局快門 | 捲簾快門 | 全局快門 | ||||
| RGB 分辨率 | 1280×800 | 1920×1080 | 1280×800 | ||||
| RGB 幀率 | 30fps | ||||||
| RGB FOV (H × V) | 90°×65° | 69°×42° | 69°×42° | 87°×58° | |||
| IMU | 有 | 無 | 有 | 無 | 無 | 無 | |
| 深度距離 (Min-Z) | ~52cm | ~28cm | ~45cm | ~7cm | |||
| 偵測範圍 | 0.6~6m | 0.3~3m | 0.5~3m | 7~50cm | |||
| 核心架構 | 視覺處理器 D4 v5 深度模塊 D450 |
視覺處理器 D4 深度模塊 D450 |
視覺處理器 D4 深度模塊 D430 |
視覺處理器 D4 深度模塊 D415 |
視覺處理器 D4 v4 深度模塊 D401 |
||
| 尺寸(mm) | 124×29×36 | 124×26×29 | 90×25×25 | 90× 25.8×25 | 99×20×23 | 42×42×23 | |
| 連接界面 | GMSL/FAKRA | USB 3 | |||||
| 防護等級 |
IP65 |
無 | |||||













| |
Gemini E | Gemini 2 | Gemini 2 L | Astra 2 | Persee+ 3D |
|---|---|---|---|---|---|
| 偵測範圍 | 0.2-2.5m | 0.15-10m | 0.25-10m | 0.6-8.0m | 0.6-8m |
| 基線 | 40mm | 50mm | 100mm | 75mm | 75 mm |
| 功耗 | AVG <2.3W | AVG <2.5W | <3W | <3W | N/A |
| 深度分辨率 | 1024×768 | 1280 x 800 | 1280 x 800 | 1600x1200 | 1280x1024 |
| RGB 分辨率 | 1920×1080 | 1920 x 1080 | 1920 x 1080 | 1920x1080 | 1920X1080 |
| 相對精度 | ≤ 1.1% @2m | ≤ 2% @2m | ≤ 2% @4m | ≤0.3% @2m | ≤0.3% @1m |
| 深度 FOV (H × V) | H79°/V62°/D91°±3° | H91°/V66°/D101°±3° | H91°/V66°/D101°±3° | H58.2°/V45.2°/D69.6°±3° | H55°/ V45/D65°±1° |
| RGB FOV (H × V) | H84.3°/V53.6° /D92.2°±3° | H86°/ V55°/ D94°±3° | H94° / V68° / D104° ± 3° | H74.7°V46.2°D82.3°±3° | H74°/V59°/D86.5°±1° |
| 場景 | 室內 / 半室外 | 室內 / 半室外 | 室內 / 半室外 | 室內 / 半室外 | 室內 |
| 連接介面 | USB 2.0 | USB 3.0&USB 2.0 | USB 3.0 &USB 2.0 | USB3.0 | USB 2.0 |
| 工作溫度 | 10℃ - 40℃ | 0℃ - 40℃ | 0℃ - 40℃ | 0℃ - 35℃ | 0℃ - 30℃ |
| 電源介面 | USB Type-C | USB Type-C | USB Type-C | USB Type-C | USB Type-C |
| 外型 | 90×25×25 mm | 90x25x30 mm | 124x29x26 mm | 145x45x39 mm | 178x46x75 mm |
| 重量 | 88.3g ±3g | 98g ± 2g | 152g ± 2g | 240.8±5g | 370g |
| 原理 | 結構光 | 結構光 | 結構光 | 結構光 | 結構光 |
| LDP | 支援 | 支援 | 支援 | 支援 | 無 |
| IMU | 無 | 支援 | 支援 | 支援 | 無 |






| Femto Mega I |
Femto Bolt |
Femto Mega | |
|---|---|---|---|
| 偵測範圍 | 0.25-3.86m | 0.5m - 5.46m | 0.5m - 5.46m |
| 基線 | N/A | N/A | N/A |
| 功耗 | AVG < 11W | AVG < 4.35W | AVG < 13W |
| 深度分辨率 | 1024 x1024 | 1024 x1024 | 1024 x1024 |
| RGB 分辨率 | 3840 x 2160 | 3840 x 2160 | 3840 x 2160 |
| Relative accuracy | < 11 mm + 0.1% | < 11 mm + 0.1% | < 11 mm + 0.1% |
| 深度 FOV (H × V) | H 120° V 120° | H 120° V 120° | H 120° V 120° |
| RGB FOV (H × V) | H 80° V 51° | H 80° V 51° D89°±2° | H 80° V 51° D89°±2° |
| 場景 | 室內 / 半室外 | 室內 / 半室外 | 室內 / 半室外 |
| 連接介面 | 乙太網路 | USB 3.0 | USB 3.0 |
工作溫度 |
10℃ - 25℃ | 10℃ - 25℃ | 10℃ - 25℃ |
| 電源介面 | POE+/DC 12~24V | USB Type-C | USB Type-C |
| 外型 | 180 x 50 x 110mm | 110 × 40 × 65mm | 145.1 × 1115.26 × 40.26 ± 2mm |
| 重量 | 1080g | 335g | 560g ± 3g |
| 原理 | iTOF | iTOF | iTOF |
| LDP | 無 | 無 | 無 |
| IMU | 支援 | 支援 | 支援 |
深度攝影機 (Depth Camera)和一般攝影機不同的是:
目前一般的攝影機是將真實世界的三維空間影像儲存成二維XY軸的平面畫面,但是深度攝影機可以測量出每一個影像點和攝影機之間的Z軸距離,因此儲存的是三維的空間資訊。
藉由深度攝影機的兩個鏡頭所擷取的影像,用演算法比較兩者的差異後就能得到影像點深度的Z軸資訊(有一些類型的深度攝影機還會在鏡頭處以紅外線等不可見光源,發射光線到拍攝目標,藉由反射回來的資訊計算各反射點與攝影機之間的距離)。
節錄於網路
目前主要可分為立體視覺(Stereo Vision)、結構光(Structured Light)、飛時測距(Time of Flight;簡稱:TOF)三種技術。
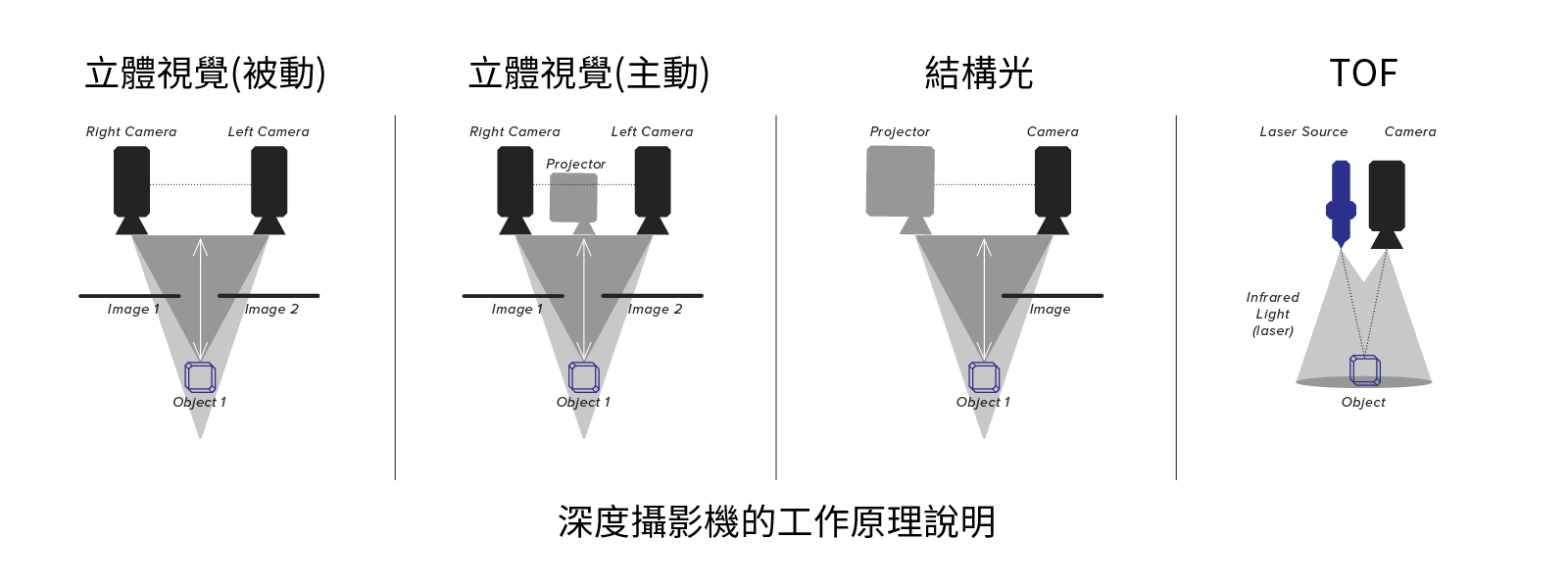
- 立體視覺(Stereo Vision)是基於人眼視差的原理,在自然光源下,透過兩個或兩個以上相機模組從不同的角度對同一物體拍攝影像,再進行三角測量法等運算來取得與物體之間的距離資訊。可細分成主動與被動
- 結構光(Structured Light)是一種主動式深度感測技術,基本零組件包含IR發射器、IR相機模組、RGB相機模組等。其原理是先對物體發射特定圖案的光斑(Pattern),再經由攝影機來接收物體表面上的光斑圖案編碼(Light Coding),進而比對與原始投射光斑的異同,並利用三角原理計算出物體的三維座標。
- 飛時測距(TOF)也是一種主動式深度感測技術,其原理為透過紅外線折返的時間去計算跟物體之間的距離,以得出3D景深圖。基本零組件包括IR發射器、IR接收器、RGB相機模組和感光元件或感應陣列。





